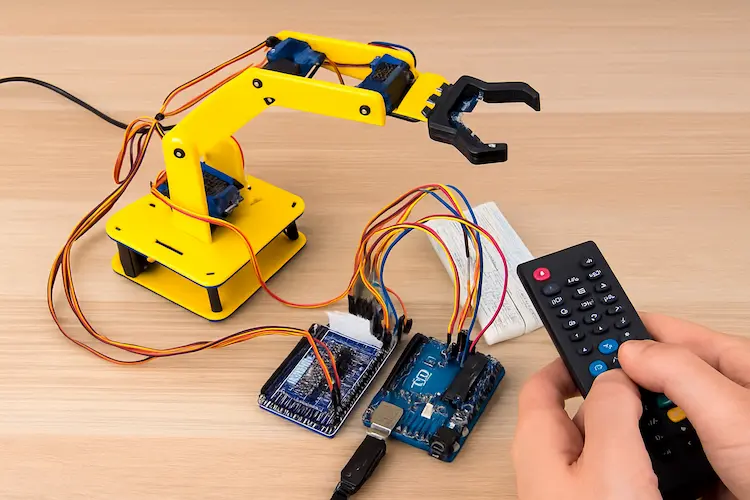
Montar um braço robótico com Arduino é uma das melhores formas de ensinar programação, automação e robótica educacional de maneira prática. Em vez de aprender código apenas na tela, o estudante vê o comando se transformar em movimento real.
O projeto combina Arduino, servomotores, estrutura artesanal e lógica de programação. Com ele, é possível construir um braço simples com ombro, cotovelo, pulso e garra, usando componentes acessíveis e uma estrutura feita de papelão rígido, MDF fino ou material reaproveitado.
A ideia é simples: o Arduino envia sinais para os servomotores, os servos giram para ângulos definidos no código, e esses movimentos acionam as articulações do braço.
Neste guia do TecMaker, você vai aprender como fazer um braço robótico com Arduino e servomotores, quais materiais usar, como ligar os fios, como programar os movimentos, quais erros evitar e como aplicar o projeto em sala de aula.
O que você vai montar neste projeto?
Você vai montar um braço robótico simples controlado por Arduino, usando servomotores para movimentar articulações como ombro, cotovelo, pulso e garra. É uma evolução natural do braço mecânico sem eletrônica.
Funciona como o controlador central, enviando sinais para cada servomotor.
Movimentam as articulações do braço em ângulos definidos pelo código.
Pode ser feita com papelão reforçado, MDF fino, acrílico, peças impressas em 3D ou material reaproveitado.
O que é um braço robótico com Arduino?
Um braço robótico com Arduino é um projeto de robótica educacional em que uma placa Arduino controla servomotores ligados a uma estrutura articulada.
Cada servo pode movimentar uma parte do braço, como:
- base;
- ombro;
- cotovelo;
- pulso;
- garra.
O Arduino executa um código e envia sinais para os motores. Esses sinais determinam o ângulo de cada servo. Assim, o braço pode levantar, dobrar, girar, abrir a garra e repetir movimentos.
Esse tipo de projeto é muito usado em:
- aulas de robótica;
- oficinas maker;
- feiras de ciências;
- cursos de Arduino;
- projetos STEAM;
- introdução à automação;
- clubes de tecnologia;
- laboratórios escolares.
A grande vantagem é que o estudante vê o código ganhando forma física.

- – Microcontrolador: ATmega328;
- – Tensão de Operação: 5v;
- – Tensão de entrada (recomendada): 7-12v;
Por que usar Arduino para ensinar automação?
O Arduino é uma plataforma acessível para ensinar a relação entre código, eletrônica e movimento. Em um braço robótico, essa relação fica muito clara.
O estudante entende que:
- o código define uma ação;
- a placa interpreta esse comando;
- o sinal elétrico chega ao servo;
- o servo gira para um ângulo;
- a estrutura mecânica se movimenta.
Essa sequência transforma conceitos abstratos em uma experiência prática.
Em vez de apenas dizer que programação controla máquinas, o projeto mostra isso acontecendo.
O que os alunos aprendem com esse projeto?
O braço robótico com Arduino trabalha várias competências ao mesmo tempo.
Na parte técnica, o estudante aprende:
- programação básica;
- portas digitais;
- sinal PWM;
- uso da biblioteca Servo;
- ligação de servomotores;
- alimentação externa;
- mecânica simples;
- ângulos e movimento;
- lógica sequencial;
- automação.
Na parte maker, desenvolve:
- prototipagem;
- testes;
- depuração;
- trabalho em equipe;
- registro de processo;
- criatividade;
- solução de problemas.
Também é uma ótima continuação para quem já montou um braço robótico mecânico com papelão e seringas, porque agora o movimento deixa de ser manual e passa a ser controlado por código.

- 【Velocidade de operação】Velocidade de corrida rápida de 0,08s/60° e torque de parada de 1,9 kg/cm, tensão operacional: 4…
- 【Engrenagem do pinhão do motor e eixo atualizados para metal】Nosso micro servo motor SG90 9g resiste à quebra dos dentes…
- 【Torque de parada 】 17,141 g/pol (1 kg/cm); Largura da zona morta: 7 microssegundos; Tipo de amplificador: controlador a…
Materiais necessários
A lista abaixo considera uma versão simples do projeto, com Arduino Uno ou compatível e servomotores pequenos.
Peças recomendadas para montar o braço robótico
Para evitar travamentos e falhas de alimentação, vale separar os componentes certos antes de começar a montagem.
- ✅ 1 Arduino Uno ou placa compatível.
- ✅ 3 a 4 servomotores SG90 para uma versão leve.
- ✅ Servos MG90S se a estrutura for mais pesada.
- ✅ Fonte externa 5V com corrente suficiente para os servos.
- ✅ Jumpers macho-macho e macho-fêmea.
- ✅ Protoboard ou borne/conector para organizar a alimentação.
- ✅ Papelão rígido, MDF fino ou peças impressas em 3D.
- ✅ Parafusos pequenos, palitos ou eixos para articulações.
- ✅ Cola quente, fita dupla face forte ou abraçadeiras pequenas.
- ✅ Potenciômetros de 10k, se quiser controlar o braço manualmente.
Para iniciantes, comece com servos SG90 e uma estrutura bem leve. Se o braço não tiver força, reduza o peso antes de comprar motores mais caros.
Não alimente vários servos direto pelo Arduino
Servomotores podem puxar mais corrente do que a placa Arduino consegue fornecer com estabilidade. Para 3 ou 4 servos, use uma fonte externa 5V adequada e mantenha o GND da fonte ligado ao GND do Arduino.

- KIT COMPLETO PARA INICIANTES: Inclui placa UNO R3, protoboard de 400 pontos, sensores, LEDs, resistores, jumpers e muito…
- SENSORES E COMPONENTES VARIADOS: Acompanha sensor de luz LDR, sensor de temperatura NTC, 6 push buttons (3 de 6x6mm e 3 …
- LEDs E RESISTORES INCLUSOS: 12 LEDs de 5mm nas cores vermelho, verde, amarelo e azul (3 de cada), além de 40 resistores …
Como funciona Arduino + servomotor?
O servomotor é um pequeno motor com controle de posição. Em vez de girar livremente como um motor DC comum, ele se move para um ângulo definido.
Em projetos com Arduino, é comum controlar servos com a biblioteca Servo.h.
Na prática, você informa ao servo algo como:
- vá para 0 graus;
- vá para 45 graus;
- vá para 90 graus;
- vá para 120 graus;
- volte para a posição inicial.
Esses ângulos movimentam as articulações do braço.
O Arduino não “pensa” como um robô autônomo nesse primeiro exemplo. Ele apenas executa uma sequência de comandos. Mesmo assim, isso já ensina lógica de automação.
Estrutura mecânica do braço
A estrutura pode ser feita de papelão reforçado, MDF fino, acrílico, madeira leve ou peças impressas em 3D.
Para uma versão escolar de baixo custo, o papelão rígido funciona bem.
Divida o braço em partes:
- base;
- ombro;
- braço principal;
- cotovelo;
- antebraço;
- pulso;
- garra.
Cada articulação precisa ter espaço para o servo se mover. O servo deve ficar bem fixado, mas o eixo precisa estar livre para girar.
Dicas de construção
Use estas orientações:
- faça a base larga e firme;
- evite braços longos demais;
- use peças leves;
- reforce articulações;
- teste o movimento antes de colar;
- não force o servo manualmente;
- deixe fios organizados;
- mantenha os servos acessíveis para manutenção.
Se a estrutura ficar pesada, os servos pequenos SG90 podem não conseguir mover o braço com estabilidade. Nesse caso, reduza o tamanho das peças ou use servos mais fortes.
Graus de liberdade: quantos movimentos o braço terá?
Em robótica, cada movimento independente é chamado de grau de liberdade.
Um braço simples pode ter:
- 1 grau de liberdade: apenas sobe e desce;
- 2 graus de liberdade: sobe/desce e dobra o cotovelo;
- 3 graus de liberdade: adiciona pulso;
- 4 graus de liberdade: adiciona garra;
- 5 ou mais: adiciona base giratória e movimentos extras.
Para iniciantes, comece com 2 ou 3 servos. Depois, adicione a garra.
Isso reduz erros e facilita a compreensão.
Ligando os servomotores ao Arduino
Um servomotor comum tem três fios:
- marrom ou preto: GND;
- vermelho: 5V;
- amarelo, laranja ou branco: sinal.
O fio de sinal vai para uma porta digital do Arduino. Em muitos tutoriais, são usadas portas como 9, 10, 11 e 6.
Uma ligação simples pode seguir esta tabela:
O ponto mais importante é este: se você usar fonte externa para os servos, o GND da fonte externa precisa estar conectado ao GND do Arduino. Sem isso, o sinal pode ficar instável.
Código básico para braço robótico com Arduino
Teste um servomotor antes da montagem
Use este código para testar um servo no pino 9 antes de prender o motor na estrutura do braço robótico.
#include <Servo.h>
Servo servoTeste;
void setup() {
servoTeste.attach(9);
}
void loop() {
servoTeste.write(0);
delay(1000);
servoTeste.write(45);
delay(1000);
servoTeste.write(90);
delay(1000);
servoTeste.write(135);
delay(1000);
servoTeste.write(180);
delay(1000);
}Conecte o fio de sinal do servo ao pino 9. Se o servo tremer, travar ou não se mover, revise a alimentação antes de montar o braço completo.
Cole este código na Arduino IDE e envie para a placa. Ele faz uma sequência simples de movimentos para testar ombro, cotovelo, pulso e garra.
Controle básico das articulações
Este exemplo movimenta os servos em sequência. Ajuste os ângulos conforme o tamanho e o limite mecânico do seu braço.
#include <Servo.h>
Servo ombro;
Servo cotovelo;
Servo pulso;
Servo garra;
void setup() {
ombro.attach(9);
cotovelo.attach(10);
pulso.attach(11);
garra.attach(6);
}
void loop() {
// Eleva o braço
ombro.write(120);
delay(800);
// Dobra o cotovelo
cotovelo.write(45);
delay(800);
// Ajusta o pulso
pulso.write(90);
delay(800);
// Abre e fecha a garra
garra.write(45);
delay(500);
garra.write(120);
delay(500);
// Retorna para a posição inicial
ombro.write(0);
cotovelo.write(0);
pulso.write(0);
garra.write(0);
delay(1000);
}
Teste os servos sem carga antes de prender na estrutura. Depois ajuste os valores de write() para evitar que o servo force contra o papelão, MDF ou suporte da garra.
Entendendo o código
O código usa a biblioteca Servo.h, que facilita o controle de servomotores no Arduino.
#include <Servo.h>
Essa linha importa a biblioteca Servo para o projeto.
Servo ombro;
Cria um objeto para controlar um servo. No exemplo, criamos quatro objetos: ombro, cotovelo, pulso e garra.
attach(9)
Associa o servo a um pino do Arduino. Por exemplo, ombro.attach(9) indica que o servo do ombro está ligado ao pino 9.
write(120)
Envia um ângulo para o servo. O valor normalmente varia entre 0 e 180 graus, dependendo do modelo e da montagem.
delay(800)
Pausa o programa por um tempo. Isso permite que o servo complete o movimento antes do próximo comando.
Esse código é ideal para iniciantes porque mostra uma sequência simples: mover, esperar, mover de novo e retornar.
Controle o braço robótico com potenciômetros
Nesta versão, cada potenciômetro controla um servo. É uma forma simples de transformar o braço robótico em um projeto interativo.
#include <Servo.h>
Servo ombro;
Servo cotovelo;
Servo pulso;
Servo garra;
int potOmbro = A0;
int potCotovelo = A1;
int potPulso = A2;
int potGarra = A3;
void setup() {
ombro.attach(9);
cotovelo.attach(10);
pulso.attach(11);
garra.attach(6);
}
void loop() {
int leituraOmbro = analogRead(potOmbro);
int leituraCotovelo = analogRead(potCotovelo);
int leituraPulso = analogRead(potPulso);
int leituraGarra = analogRead(potGarra);
int anguloOmbro = map(leituraOmbro, 0, 1023, 20, 140);
int anguloCotovelo = map(leituraCotovelo, 0, 1023, 20, 140);
int anguloPulso = map(leituraPulso, 0, 1023, 30, 150);
int anguloGarra = map(leituraGarra, 0, 1023, 40, 120);
ombro.write(anguloOmbro);
cotovelo.write(anguloCotovelo);
pulso.write(anguloPulso);
garra.write(anguloGarra);
delay(20);
}
Cada potenciômetro deve ter uma ponta no 5V, outra no GND e o pino central ligado às entradas A0, A1, A2 e A3. Ajuste os limites do map() para evitar que os servos forcem a estrutura.
O que o código com potenciômetros faz?
O Arduino lê a posição de cada potenciômetro, transforma essa leitura em um ângulo e envia o comando para o servomotor correspondente.
- ✅
analogRead()lê o valor do potenciômetro entre 0 e 1023. - ✅
map()converte esse valor para uma faixa de ângulos segura. - ✅
write()envia o ângulo final para o servo. - ✅
delay(20)suaviza a leitura e evita movimentos bruscos.
Como ajustar os ângulos sem quebrar o braço
Não comece usando todos os ângulos de uma vez. Teste aos poucos.
Por exemplo:
- Prenda apenas o servo do ombro.
- Teste
write(0),write(45)ewrite(90). - Observe se a estrutura força.
- Ajuste os limites.
- Só depois conecte a próxima articulação.
Se o braço bater em algum ponto, reduza o ângulo.
Nem toda montagem aceita 0 a 180 graus. Em protótipos artesanais, muitas vezes o intervalo seguro fica entre 30 e 120 graus.
Erros comuns e como resolver
O que fazer se o braço robótico não funcionar?
A maioria dos problemas aparece por alimentação fraca, fios trocados, ângulos exagerados ou estrutura pesada demais. Use a tabela abaixo para identificar a causa e corrigir o projeto.
Em sala de aula, não entregue a resposta imediatamente. Peça para os alunos investigarem: o problema está no código, na alimentação, na ligação dos fios ou na estrutura mecânica?
Aplicações pedagógicas em sala de aula
O braço robótico com Arduino pode ser aplicado em diferentes disciplinas.
Programação
Os alunos aprendem sequência, função, biblioteca, repetição, tempo de espera e controle de comportamento.
Física
O projeto permite discutir torque, rotação, força, alavancas, equilíbrio e atrito.
Matemática
Ângulos, tempo, proporção, medidas e estimativas aparecem naturalmente durante a montagem.
Engenharia
A turma cria um protótipo, testa, falha, corrige e melhora.
Arte e design
A estrutura pode ser desenhada, personalizada, reforçada e melhorada visualmente.
Tecnologia
O estudante entende como código e hardware trabalham juntos para executar uma ação no mundo físico.
Veja a montagem de um braço robótico com Arduino
A demonstração ajuda a visualizar a montagem da estrutura, a ligação dos servomotores, o uso de potenciômetros e a calibração dos movimentos.

Como organizar a atividade em etapas
Para aplicar com uma turma, divida o projeto.
Aula 1: Introdução ao Arduino e servos
Mostre o que é a placa, o que é um servo e como o código controla movimento.
Aula 2: Teste individual dos servos
Cada grupo testa um servo isolado com o código básico.
Aula 3: Construção da estrutura
Os alunos cortam e montam a base, braço, cotovelo e garra.
Aula 4: Ligação dos servos
A turma conecta os servos, confere alimentação e testa cada movimento.
Aula 5: Código completo
Os grupos ajustam ângulos e criam uma sequência de movimentos.
Aula 6: Desafio final
Cada grupo tenta fazer o braço pegar ou mover um objeto leve.





Expansões possíveis
Depois que a versão básica funcionar, você pode propor novos desafios.
Nível intermediário
- adicionar potenciômetros;
- controlar a garra por botão;
- usar joystick;
- criar base giratória;
- incluir sensor ultrassônico;
- criar movimentos gravados.
Nível avançado
- controle via Bluetooth;
- controle por aplicativo;
- modo automático de repetição;
- integração com sensores;
- uso de driver para múltiplos servos;
- peças impressas em 3D;
- visão computacional com OpenCV.
Cada expansão adiciona uma camada de aprendizagem.
Checklist final do professor
Antes de apresentar o projeto
Use esta lista para verificar se o braço robótico com Arduino está pronto para a aula, feira ou demonstração.
- ✅ Os servos foram testados individualmente?
- ✅ A estrutura está leve, firme e bem alinhada?
- ✅ A fonte externa 5V está funcionando?
- ✅ O GND da fonte externa está ligado ao GND do Arduino?
- ✅ Os ângulos do código não forçam os servomotores?
- ✅ Os fios estão organizados e sem risco de curto?
- ✅ A garra abre e fecha sem travar?
- ✅ A turma entende o papel de cada componente?
- ✅ Houve reflexão final sobre erro, teste e melhoria?
A apresentação final deve mostrar não só o braço funcionando, mas também o raciocínio usado para corrigir falhas de código, ligação elétrica e mecânica.
Leituras externas confiáveis
Fontes oficiais para aprender Arduino, servos e simulação
Estes materiais ajudam professores e estudantes a aprofundar a montagem, testar circuitos e entender o controle de servomotores.
Arduino Getting Started with Arduino Guia oficial para iniciar com placas Arduino, ambiente de programação e primeiros projetos. Biblioteca Servo Arduino Servo Reference Documentação da biblioteca usada para controlar servomotores com Arduino. Servomotores Servo Motor Basics with Arduino Material oficial para entender conexão e controle básico de servomotores com Arduino. Tutorial Basic Servo Control Exemplo oficial para controlar um servo padrão usando a biblioteca Servo. Simulação Tinkercad Circuits Ferramenta online para montar circuitos virtuais, testar Arduino e simular programação. Aprendizado Learn Circuits Área de aprendizado do Tinkercad para circuitos, Arduino, eletrônica básica e programação.Leia também no TecMaker
Continue a trilha de robótica educacional
Estes conteúdos complementam o projeto e ajudam a montar uma sequência completa de aprendizagem maker.
Antes do Arduino Braço robótico mecânico Comece pela versão sem eletrônica, usando papelão, seringas e hidráulica simples. Robótica unplugged Robótica sem eletrônica Projetos para ensinar lógica, mecânica e criatividade sem componentes eletrônicos. Guia inicial Robótica educacional para iniciantes Entenda como começar com robótica na escola de forma simples e progressiva. Cultura maker Cultura Maker: guia completo Veja projetos, ferramentas e práticas para aplicar aprendizagem mão na massa. Escolas públicas Projetos maker para escolas públicas Ideias de baixo custo para levar tecnologia, criatividade e prototipagem para a sala de aula.Perguntas frequentes sobre braço robótico com Arduino
O que é um braço robótico com Arduino?
É um projeto em que uma placa Arduino controla servomotores ligados a uma estrutura articulada. Cada servo movimenta uma parte do braço, como ombro, cotovelo, pulso ou garra.
Como fazer um braço robótico com Arduino e servomotores?
Você precisa montar uma estrutura leve, fixar servos nas articulações, ligar os fios de sinal ao Arduino, alimentar os servos com fonte externa 5V e enviar um código usando a biblioteca Servo.
Posso usar papelão na estrutura?
Sim. Papelão rígido funciona bem para protótipos educacionais. Para mais resistência, use papelão duplo, MDF fino ou peças impressas em 3D.
Quantos servos preciso para um braço robótico simples?
Com 2 servos já é possível criar movimentos básicos. Com 3 ou 4 servos, você pode controlar ombro, cotovelo, pulso e garra.
Posso alimentar os servos pelo Arduino?
Para um único servo pequeno, alguns testes simples podem funcionar. Porém, para vários servos, o recomendado é usar fonte externa 5V e conectar o GND da fonte ao GND do Arduino.
O que é PWM no Arduino?
PWM é uma forma de controlar sinais elétricos de maneira parecida com variação de intensidade. No caso de servos, a biblioteca Servo facilita esse controle para definir ângulos de movimento.
Qual servo usar no projeto?
Para iniciantes, o SG90 é comum e barato. Para braços mais pesados, servos como MG90S podem oferecer mais resistência, mas exigem atenção à alimentação.
Dá para simular antes de montar?
Sim. Ferramentas como Tinkercad Circuits permitem testar circuitos e código de Arduino virtualmente antes da montagem física.
Esse projeto serve para escolas públicas?
Sim. Ele pode ser adaptado com materiais acessíveis e serve para ensinar programação, física, matemática, engenharia e cultura maker.
Qual é o próximo passo depois do braço básico?
Você pode adicionar potenciômetros, joystick, botões, sensores ultrassônicos, Bluetooth, base giratória ou movimentos automáticos.
Conclusão: programação que vira movimento real
O braço robótico com Arduino é um projeto poderoso porque mostra, de forma concreta, como programação e eletrônica podem controlar uma máquina.
Ao montar a estrutura, ligar os servos e escrever o código, o estudante percebe que robótica não é apenas teoria. É uma sequência de decisões: escolher materiais, testar conexões, ajustar ângulos, corrigir erros e melhorar o protótipo.
Esse projeto também cria uma trilha de aprendizagem muito clara. Primeiro, o aluno pode construir um braço mecânico sem eletrônica. Depois, evolui para Arduino e servomotores. Em seguida, pode adicionar sensores, joystick, Bluetooth e automação.
Para professores, oficinas maker e projetos educacionais, o braço robótico com Arduino é uma excelente ponte entre criatividade, programação e engenharia aplicada.
Continue acompanhando o TecMaker para descobrir projetos de robótica educacional, cultura maker e tecnologias acessíveis para transformar ideias em prática.
A Equipe TecMaker é o núcleo editorial e de testes do portal, dedicada a trazer análises imparciais, comparativos de produtos e as últimas notícias do universo da tecnologia. Nosso objetivo é decodificar a inovação e ajudar nossos leitores a fazerem as melhores escolhas no mercado digital e de dispositivos emergentes.